
Academic Instruction & Mentoring
Leading and coordinating technical courses at Paderborn University (RAT Group):
Master Thesis: High-Fidelity Event Simulation in NVIDIA Isaac Sim
MentorTopic: Simulation & Neuromorphic Perception
Developing native, high-fidelity event generation modules within NVIDIA Isaac Sim. This research leverages Omniverse's RTX rendering and GPU-accelerated physics to overcome the photorealism limitations of traditional event simulators like ESIM, enabling complex robotic task training.
View Topic DescriptionProject Course: Modern Representations for Event-Based Vision
InstructorSemester: WS 2025/26
Investigating structured representations to bridge the gap between asynchronous event streams and standard CV algorithms. Topics cover Voxel Grids, Time Surfaces, and Learning-based latent features critical for neuromorphic perception.
View Topic DescriptionMaster Thesis: Backend Optimization for Event-based SLAM
MentorSupervising research on factor graph optimization and state estimation techniques. I guide students in improving the accuracy and efficiency of event-based vision systems for real-time robotic applications.
View Topic DescriptionProject Course: Visual SLAM for Drones
InstructorLeading the implementation of Visual SLAM algorithms on autonomous drones. I oversee the integration of PX4/Ardupilot stacks with multimodal sensor data.
View Topic DescriptionSelected Research
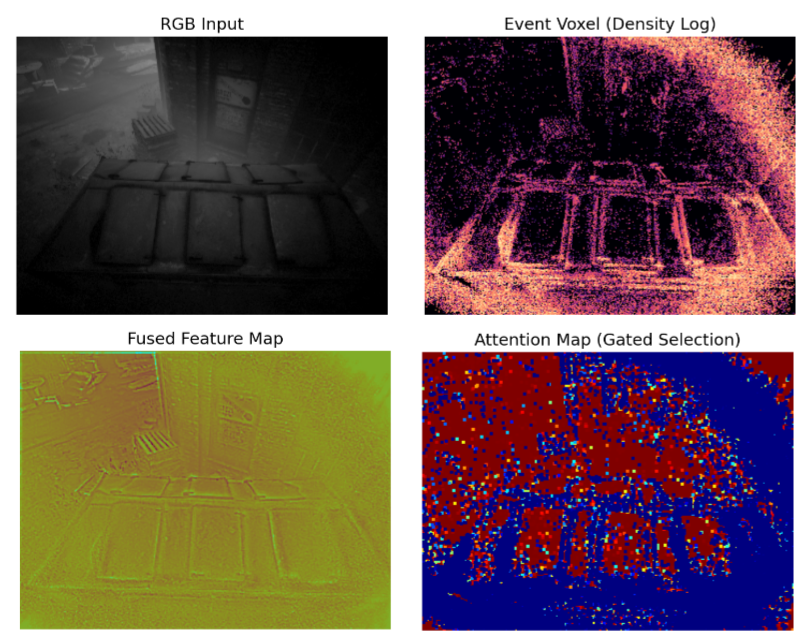
Robust Event-Based Monocular Depth Estimation
Research focused on reliability-aware gated fusion for robust depth estimation using event cameras. This approach enables high-frequency and high-dynamic-range depth perception in challenging robotic scenarios.
SHEREC Project
Research ProjectContributing to the SHEREC project with a primary focus on Event-based SLAM development and optimization for resilient robotic autonomy.
Handheld Device Design for Event-Based Dataset Collection
Developing a custom handheld device specifically for sensor fusion and high-quality dataset collection.
Selected Publications
Edge-uSLAM: Event-based Edge-driven SLAM
A novel framework integrating event cameras with edge computing to achieve sub-millisecond motion tracking and robust mapping in high-dynamic-range environments.